Contribution ŗ la problťmatique du choix des paysages de |
recherche locale stochastique : |
Le cas des rŤgles de Golomb. |
Pour l'obtention du DiplŰme d'Etudes Approfondies En Informatique, Automatique et Productique
La recherche locale constitue une arme redoutable pour attaquer des problŤmes de grande taille rťputťs trŤs difficiles tels que le
voyageur de commerce et la partition de graphes.
La recherche locale reprťsente un outil puissant pour rťsoudre les problŤmes rťputťs difficiles
(notamment NP-complet) tels que la coloration de graphes, le problŤme du sac ŗ dos, le problŤme du voyageur de commerce.
Mais la conception d'un algorithme de recherche locale dťdiť ŗ un problŤme nťcessite de faire des choix concernant la
stratťgie de recherche (c'est ŗ dire la maniŤre dont notre problŤme va Ítre rťsolu), l'espace de recherche, le voisinage,
la fonction objectif, les paramŤtres de contrŰle de la recherche.De maniŤre gťnťrale les concepteurs font ces choix de maniŤre
empirique ou en ce basant sur des travaux expťrimentaux antťrieurs.
La recherche locale se base sur deux ťlťments fondamentaux, la stratťgie de recherche ainsi que
l'espace de recherche. Notre objectif est de proposer une mťthode de choix d'un paysage de recherche basť
sur l'ťtude expťrimentale de plusieurs variantes de paysages avec un mÍme algorithme de rťfťrence : Mťtropolis.
Le cadre expťrimental que j'ai choisi pour illustrer cette approche est celui de la recherche de rŤgles de Golomb.
Ce problŤme a ťtť choisi parce qu'il est difficile (on ne sait le rťsoudre qu'en temps exponentiel) et qu'il nous
permet de dťcliner plusieurs variantes de paysages de recherche basťs sur des voisinages diffťrents.
D'autre part, il y a peu de publications scientifiques qui abordent la recherche des rŤgles de Golomb par des mťthodes de recherche
locale stochastique. De ce fait il nous parait intťressant de vťrifier la traitabilitť de ce problŤme avec cette approche.
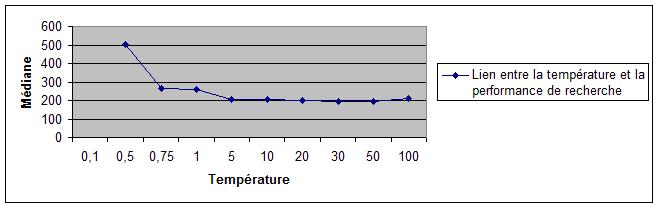
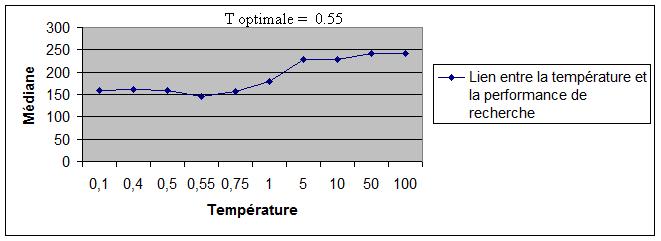
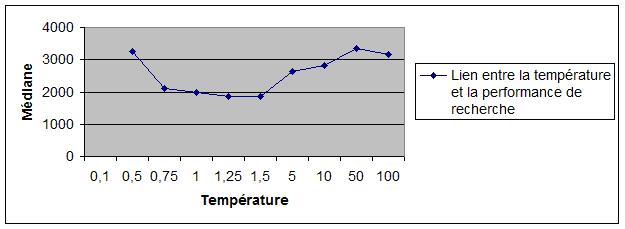
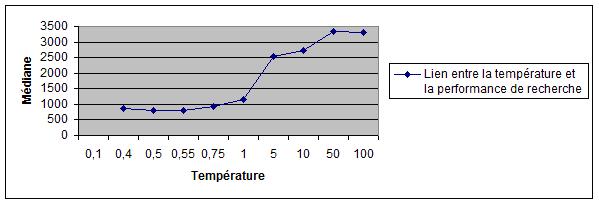
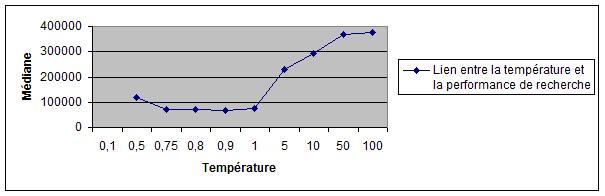
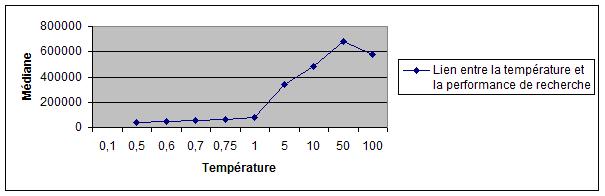
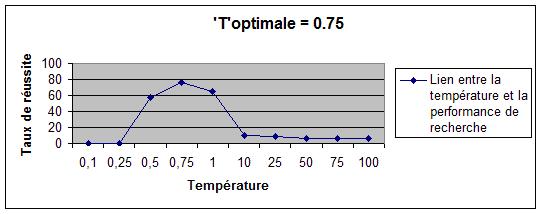
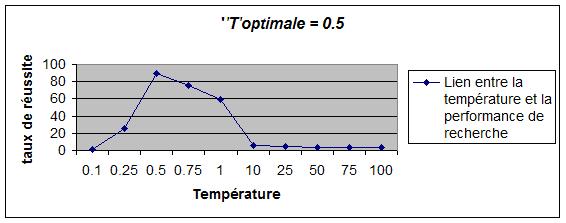
L'algorithme implťmentť (Mťtropolis) est contrŰlť par un paramŤtre appelť tempťrature. Pour chaque variante de paysage, nous dťterminons
la valeur optimale de la tempťrature sur la basede statistiques d'exťcutions, puis nous ťtudions
l'ťvolution de cette valeur en fonction de la taille des rŤgles de Golomb recherchťes.
La validitť de notre approche repose sur l'hypothŤse que le paysage de recherche (parmi ceux ťtudiťs) qui donne le meilleur rťsultat avec
Mťtropolis est ťgalement le paysage le plus performant avec des stratťgies de recherche plus ťlaborťes.
Le rapport est organisť comme suit : la premiŤre partie reprťsente un ťtat de l'art qui contient deux chapitres, nous prťsentons en
chapitre 1 quelques notions sur la recherche locale et quelques variantes comme le recuit simulť.
En chapitre 2 nous prťsentons le problŤme de la recherche des rŤgles de golomb qui servirent de base ŗ nos expťrimentations.
Dans la deuxiŤme partie (chapitre 3) nous introduisons deux paysages associťs au problŤme de recherche de rŤgles de Golomb,
puis nous prťsentons une ťtude empirique de l'efficacitť de Mťtropolis sur ces deux paysages. Nous dťveloppons
l'idťe d'utiliser une telle dťmarche comme base d'une mťthode de choix d'un paysage de recherche lors de
la conception d'un systŤme de recherche locale stochastique.
La recherche locale , appelťe aussi " descente " ou " amťlioration itťrative ",
reprťsente une classe d'heuristiques trŤs anciennes. Traditionnellement, la recherche locale constitue une
arme redoutable pour attaquer des problŤmes rťputťs trŤs difficiles tels que le voyageur de commerce et la partition de graphes.
Une mťthode de recherche locale est un processus itťratif fondť sur deux ťlťments essentiels :
la notion de paysage de recherche et celle de stratťgie de recherche.
Le paysage de recherche on peut le reprťsenter sous la forme d'un graphe dont les sommets sont associťs
aux configurations de l'espace de recherche et dont les arrÍtes dťfinissent une relation de voisinage.
A chaque configuration est associťe une valeur d'objectif qui peut Ítre un entier dont la valeur est minimale pour les solutions.
La stratťgie de recherche c'est elle qui dťtermine la maniŤre dont le paysage de recherche sera explorť.
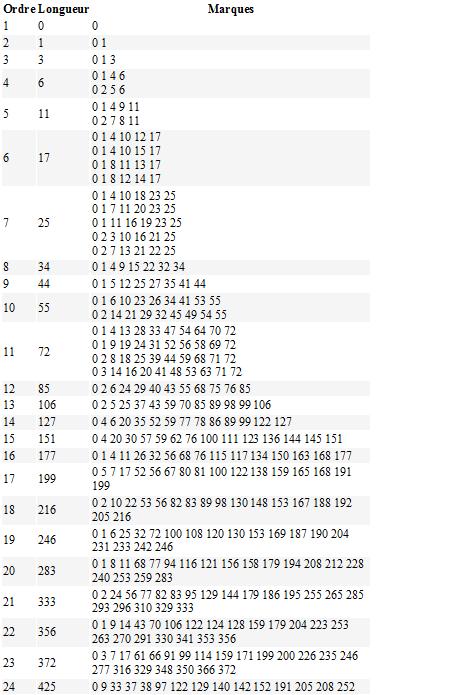
Les rŤgles ordinaires ont leurs marques ťgalement espacťes par une certaine unitť de mesure (par exemple 1 centimŤtre), ainsi quelqu'un peut mesurer n'importe quelle distance entre 1 et la longueur de la rŤgle en plaÁant un segment entre deux marques quelconques de la rŤgle. Par exemple pour mesurer une distance de 5 centimŤtres, il est possible de placer un segment entre les marques de 0 et 5 ou 1 et 6 centimŤtres etc.
 RŤgle Ordinaire |
|
 RŤgle de Golomb |
Les rŤgles de Golomb peuvent Ítre considťrťes comme un genre spťcial de rŤgles. Pour qu'une rŤgle soit une rŤgle de Golomb, elle doit
avoir seulement un seul choix au plus si on veut mesurer une distance spťcifique. Plus prťcisťment chaque distance entre
deux nombres (de marques) doit Ítre diffťrente de tous les autres.
Par exemple s'il y a une marque ŗ la position 2 et une autre a la position 5, aucune autre paire des marques doit Ítre sťparťe
par une distance de 3. De cette dťfinition il dťcoule qu'une rŤgle ordinaire avec plus de 2 marques n'est pas une rŤgle de Golomb.
La rŤgle de Golomb de la figure 3 peut mesurer les distances {1, 2, 3, 4, 5, 7, 8, 9, 10, 11} avec un choix appropriť,
des marques ; et aucune autre distance ne peut Ítre mesurťe. Pour chacune de ces distances, seulement une paire de
marques peut Ítre employťe pour faire une telle mesure, donc la propriťtť de Golomb est satisfaite.
| Mediane V2 / Mediane V1 | 0.7474 | 0.4268 | 0.5961 | 0.5978 |
| RŤgles | K = 6 / L = 17 | K = 7 / L = 25 | K=8 / L = 34 | K = 9 / L = 44 |
Nous avons mis en ťvidence l'impact du choix du voisinage sur l'efficacitť d'une rťsolution d'un problŤme combinatoire la recherche des rŤgles de Golombs, en fixant le processus ťtudiť (Mťtropolis) et en variant les paysages. Nous avons proposť une mťthode de comparaison et de choix de paysages de recherche basťe sur l'ťvaluation des paysages candidat ŗ l'aide de Mťtropolis, pour comparer l'efficacitť des relations de voisinages.
L'approche proposťe peut ťgalement Ítre utilisťe pour :
Mais ceci ne constitue qu'un premier dťfrichage car beaucoup de questions restent ouvertes :
Quelles sont les limites de la robustesse de la mťthode vis avis d'un plus large panel de stratŤgies de recherche (si un paysage est meilleur qu'un autre pour une stratťgie de recherche , le demeure t-il pour toutes les stratťgies de recherche ?) et de problŤmes (la mťthode est elle gťnťralisable ŗ n'importe quel problŤme).
Peut on amťliorer le choix de voisinage en utilisant d'autres critŤres tels que par exemple des mesures de correlation voisinage-coŻt.
